Translação e Rotação
Selecione os exercícios por
Dificuldade
Categoria
Outros
Os botões acima permitem selecionar que tipos de exercício você deseja ver na lista.
Para retirar alguma categoria da lista, clique sobre o botão para toná-lo inativo. Para adicioná-la, clique novamente no botão.
A mudança de coordenadas entre os sistemas $xy$ e $x_{1}y_{1}$ é feita através de uma matriz ortogonal $U$, como segue
\[ \begin{pmatrix}x_{1}\\ y_{1}\end{pmatrix} = \begin{pmatrix}{\frac{\,3}{5}} & {\frac{\,4}{5}} \\{\frac{\,-4}{5}} & {\frac{\,3}{5}} \end{pmatrix}\begin{pmatrix}x\\ y\end{pmatrix}\quad \text{ e }\quad\begin{pmatrix}x\\ y\end{pmatrix} = \begin{pmatrix}{\frac{\,3}{5}} & {\frac{-4}{5}} \\ {\frac{\,4}{5}} & {\frac{\,3}{5}} \end{pmatrix}\begin{pmatrix}x_{1}\\ y_{1}\end{pmatrix},\quad \text{ lembrar que } U^{-1} = U^{t}.\]
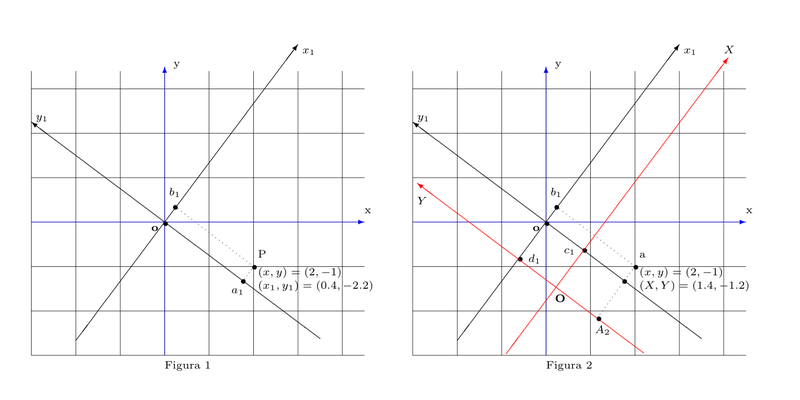
Já a mudança entre os sistemas $x_{1}y_{1}$ e $XY$ é dada por $X = x_{1}+1$, $Y = y_{1}+1$.
Encontre as coordenadas dos pontos $a_{1}$ e $b_{1}$ (Figura 1) nos sistemas $xy$ e $x_{1}y_{1}$.
Encontre as coordenadas dos pontos $c_{1}$, ,$d_{1}$, $\textbf{O}$, e $A_{2}$ (Figura 2) em relação aos eixos $xy$, $x_{1}y_{1}$ e $XY$.
Suponha que o sistema de coordenadas $x'y'$ tenha sido obtido pela rotação de um sistema de coordenadas $xy$ por um ângulo $\theta$. Explique como podemos encontrar as coordenadas $xy$ de uma reta cuja equação nas coordenadas $x'y'$ seja conhecida.
Considere o plano com o sistema cartesiano canônico $xy$ e faça uma rotação de um ângulo $\theta$ obtendo um novo sistema $\overline{x}$ $\overline{y}$. Seja $P$ um ponto do plano.
Se $P=(2,2)$ no sistema $xy$ e $\theta=\pi/3$, encontre as coordenadas de $P$ no sistema $\overline{x}$ $\overline{y}$.
Se $P=(2,2)$ no sistema $\overline{x}$ $\overline{y}$ e $\theta=\pi/3$, encontre as coordenadas de $P$ no sistema $xy$.
Transforme a equação $x^2+y^2=4$ para o sistema $\overline{x}$ $\overline{y}$.
Suponha que $0<\theta <\pi/2$ e que $a=\tan\theta$ ($a$=tangente de $\theta$). Transforme a equação $y=ax$ para o sistema $\overline{x}$ $\overline{y}$.
Suponha que o sistema de coordenadas $x'y'$ tenha sido obtido pela rotação de um sistema de coordenadas $xy$ por um
ângulo de $30^\circ$. Use a rotação \begin{align*}x & = x'\cos\theta - y'\sin\theta, \\y & = x'\sin\theta + y'\cos\theta, \end{align*}
para encontrar as coordenadas $x'y'$ da curva $y=x^2$.
A mudança de coordenadas entre os sistemas $xy$ e $x_{1}y_{1}$ é feita através de uma matriz ortogonal $U$, como segue
\[ \begin{pmatrix}x_{1}\\ y_{1}\end{pmatrix} = \begin{pmatrix}{\frac{\,3}{5}} & {\frac{\,4}{5}} \\{\frac{\,-4}{5}} & {\frac{\,3}{5}} \end{pmatrix}\begin{pmatrix}x\\ y\end{pmatrix}\quad \text{ e }\quad\begin{pmatrix}x\\ y\end{pmatrix} = \begin{pmatrix}{\frac{\,3}{5}} & {\frac{-4}{5}} \\ {\frac{\,4}{5}} & {\frac{\,3}{5}} \end{pmatrix}\begin{pmatrix}x_{1}\\ y_{1}\end{pmatrix},\quad \text{ lembrar que } U^{-1} = U^{t}.\]
Já a mudança entre os sistemas $x_{1}y_{1}$ e $XY$ é dada por $X = x_{1}+1$, $Y = y_{1}+1$.
Encontre as equações das retas suporte do eixo $X$ e do eixo $Y$ em relação aos sistemas $x_{1}y_{1}$ e $xy$.
Encontre as equações das retas suporte do eixo $x_{1}$ e do eixo $y_{1}$ em relação ao sistema $xy$.
Seja $\mathcal{L}$ a reta cuja equação no sistema $xy$ é dada por $y = 2x + 1$. Encontre as equações de $\mathcal{L}$ em relação aos eixos $x_{1}y_{1}$ e $XY$.
Suponha que o sistema de coordenadas $x'y'$ tenha sido obtido pela rotação de um sistema de coordenadas $xy$ por um ângulo $\theta$. Mostre que, para cada valor de $\theta$, a equação $x^2+y^2=r^2$ é transformada na equação $x'^2+y'^2=r^2$. Dê uma explicação geométrica.
Suponha que os eixos coordenados estejam fixos, mas a posição $P(x,y)$ de um inseto é movida para uma nova posição $P'(x',y')$ através de uma rotação do ponto por um ângulo $\alpha$ em torno da origem. Naturalmente, nesta rotação o ponto $P$ estará sempre sobre um círculo fixo com centro na origem. Mostre que a nova posição do inseto será \begin{align*} x' & = x\cos\alpha - y\sin\alpha \\ y' & = x \sin\alpha + y\cos\alpha \end{align*}.
Sejam $x$, $y$ os eixos cartesianos usuais do plano. Faça a mudança de variáveis $X = x - 2$ e $Y = y + 3$, que corresponde a mudarmos a origem para o ponto $\textbf{O} = (2,-3)$.
Dado o ponto $P=(1,4)$ no sistema $xy$, encontre as coordenadas de $P$ no sistema $XY$.
Dado o ponto $A=(2,1)$ no sistema $XY$, encontre as coordenadas de $A$ no sistema $xy$.
Os extremos de uma corda elástica com um nó em $K(x,y)$ são presos a um ponto fixo $A(a,b)$ e um ponto $P$ sobre a borda de um pneu de raio $r$ centrado em $(0,0)$. Conforme o pneu gira, $K$ traça uma curva $C$. Encontre a equação desta curva. Assuma que a corda permanece presa e estica uniformemente (ou seja, a razão $\alpha:=|KP|/|AP|$ é constante).
Tome $x'y'$ o sistema de eixos do plano que é a translação do sistema $xy$ para a nova origem $O'=(1,1)$, i.e., $ x'=x-1$ e $y'=y-1$.
Dado o ponto $P=(1,4)$ no sistema $xy$, encontre as coordenadas de $P$ no sistema $x'y'$.
Dado o ponto $A=(2,1)$ no sistema $x'y'$, encontre as coordenadas de $A$ no sistema $xy$.
Considere a reta $\mathcal{L}$ que no sistema $xy$ tem equação $2x - 3y + 4 = 0$. Qual seria a equação de $\mathcal{L}$ no sistema $x'y'$? Mudando-se a equação, muda-se $\mathcal{L}$ de lugar? O desenho muda?
Dada a curva $\mathcal{C}$, do plano, cujos pontos têm coordenadas $(x,y)$, no sistema $xy$, satisfazendo a equação $x^2-4x+y^2-6y=12$, encontre a equação que os pontos de $\mathcal{C}$ com coordenadas $(x',y')$ no sistema $x'y'$ devem satisfazer nas variáveis $x'y'$.
Considere o plano com o sistema cartesiano canônico $xy$ e faça uma rotação de um ângulo $\theta$, com $0\leq \theta \leq\pi/2$ obtendo o novo sistema $\overline{x}$ $\overline{y}$. Seja $(*)$ a equação:
$$(*) \ \ \ Ax^2+Bxy+Cy^2+Dx+Ey+F=0$$,
com $A$, $B$, $C$, $D$, $E$, $F$ números reais. Ao transformar $(*)$ para o sistema $\overline{x}$ $\overline{y}$ obtemos:
$$(**) \ \ \ \overline{A} \overline{x}^2+\overline{B}\overline{x} \overline{y}+ \overline{C}\overline{y}^2+ \overline{D}\overline{x}+ \overline{E}\overline{y}+\overline{F}=0$$.
Mostre que:
\begin{align*} \overline{A} & = A\cos^2\theta+B\sin\theta\cos\theta+C\sin^2\theta, \\ \overline{B} & =-2A\sin\theta\cos\theta+B(\cos^2\theta-\sin^2\theta)+2C\sin\theta\cos\theta,\\ \overline{C} & = A\sin^2\theta-B\sin\theta\cos\theta+C\cos^2\theta, \\ \overline{D} & = D\cos\theta+E\sin\theta, \\ \overline{E} & = E\cos\theta-D\sin\theta\;\;\;\;\; \text{e} \\ \overline{F} & = F. \end{align*}
Supondo $A>0$ e $F<0$, conclua, a partir de 1, que a equação $(*)$ representa uma circunferência de centro $(0,0)$ e raio $r=\sqrt{\frac{-F}{A}}$ se, e somente se, para todo $\theta$, tivermos que $A=\overline{A}$, $B=\overline{B}$, $C=\overline{C}$,
$D=\overline{D}$, $E=\overline{E}$ e $F=\overline{F}$.
Sejam
$M= \left( \begin{array}{cc}A & \frac{B}{2}\\\frac{B}{2}& C \\\end{array}\right)$, $\overline{M}= \left( \begin{array}{cc}\overline{A} & \frac{\overline{B}}{2}\\\frac{\overline{B}}{2}&\overline{C}\end{array}\right)$ e $R_{\theta}=\left(\begin{array}{cc}\cos\theta&-\sin\theta\\\sin\theta&\cos\theta\end{array}\right)$.
Mostre, a partir de 1, que $\overline{M}=R_{\theta}^{t}\cdot M\cdot R_{\theta}$ e, calculando o determinante dos dois lados da igualdade, conclua que $\Delta=B^2-4AC=\overline{B}^{2}-4\overline{A}\overline{C}$, qualquer que seja o ângulo $\theta$ (OBS: $\Delta$ é conhecido pelo nome de discriminante da equação $(*)$ e o item 3 está dizendo que ele é invariante por rotação).
Suponha que o sistema de coordenadas $x'y'$ tenha sido obtido pela rotação de um sistema de coordenadas $xy$ por um ângulo $\theta$. Explique como podemos encontrar as coordenadas $xy$ de um ponto cujas coordenadas $x'y'$ sejam conhecidas.
Seja $Q$ um retângulo centrado na origem, cujo lado maior mede o triplo do lado menor. Sabendo que um dos vértices de $Q$ é $V_1=(1,2)$ e que o vértice $V_2$, consecutivo a $V_1$ no sentido trigonométrico (anti-horário), é tal que $V_1V_2$ é um lado menor, determine os outros vértices de $Q$.
Tomando o ângulo $\theta=\widehat{V_10V_2}$, temos que $V_2 = R_{\theta}(V_1)$, onde $$R_\theta=\left(\begin{array}{cc} \cos\theta & -\sin\theta \\ \sin\theta & \cos\theta \end{array} \right) $$ denota a rotação por um ângulo $\theta$ (Fig.). Sendo $P$ o ponto médio do segmento $V_1V_2$, vamos ter que $\dfrac{\theta}{2}=\widehat{POV_2}$. Sendo $V_1V_2$ um lado menor e dada a relação entre os lados (enunciado), segue que $|OP|=3|PV_2|$. Assim, o triângulo retângulo $OPV_2$ nos fornece que $$ \sin\dfrac{\theta}{2} = \dfrac{|PV_2|}{|OV_2|} \quad\text{e}\quad \cos\dfrac{\theta}{2}=\dfrac{|OP|}{|OV_2|}=\dfrac{3|PV_2|}{|OV_2|}=3\sin\dfrac{\theta}{2}, $$ o que juntamente com a relação fundamental $\sin^2\theta+\cos^2\theta=1$, resulta em $\sin^2\dfrac{\theta}{2}+9\sin^2\dfrac{\theta}{2}=1$. Ou seja, temos que $$ \sin\dfrac{\theta}{2}=\dfrac{\sqrt{10}}{10} \quad\mathrm{e}\quad\cos\dfrac{\theta}{2}=\dfrac{3\sqrt{10}}{10}.$$ Conseqüentemente, temos que $$\cos\theta= \cos(2\dfrac{\theta}{2})=\cos^2\dfrac{\theta}{2}-\sin\dfrac{\theta}{2}= \dfrac{4}{5}\quad \text{e}$$ $$\sin\theta= \sin(2\dfrac{\theta}{2})= 2\cos\dfrac{\theta}{2}\sin\dfrac{\theta}{2}= \dfrac{3}{5} .$$ Assim, $$ V_2 = R_{\theta}(V_1)=\left(\begin{array}{cc} \dfrac{4}{5} & -\dfrac{3}{5} \\ \dfrac{3}{5} & \dfrac{4}{5} \end{array}\right)\left(\begin{array}{c} 1 \\ 2 \end{array}\right) = \left(\begin{array}{rcl} -\dfrac{2}{5} &,&\dfrac{11}{5} \end{array}\right). $$ Finalmente, como $V_3=R_{\pi}(V_1)$, $V_4=R_{\pi}(V_2)$, $cos\pi=-1$ e $\sin\pi=0$, obtemos que $$V_3=-V_1=(-1,-2) \quad \text{e}\quad V_4=-V_2=(\dfrac{2}{5},-\dfrac{11}{5}).$$